Movimiento mecánico
La primera contribución importante se debe a Aristóteles. Aristóteles define, el movimiento, lo dinámico (το δυνατόν), como "La realización acto, de una capacidad o posibilidad de ser potencia, en tanto que se está actualizando". El problema está en que Aristóteles invierte el estudio de la cinemática y dinámica, estudiando primero las causas del movimiento y después el movimiento de los cuerpos. Este error dificultó el avance en el conocimiento del fenómeno del movimiento hasta, en primera instancia, San Alberto Magno, que fue quien advirtió este error, y, en ultima instancia hasta, Galileo Galilei e Isaac Newton. De hecho, Thomas Bradwardine, en 1328, presentó en su De proportionibus velocitatum in motibus una ley matemática que enlazaba la velocidad con la proporción entre motivos a fuerzas de resistencia; su trabajo influyó la dinámica medieval durante dos siglos, pero, por lo que se ha llamado un accidente matemático en la definición de "acrecentar", su trabajo se descartó y no se le ha dio reconocimiento histórico en su día. Ya con Galileo sus experimentos sobre cuerpos uniformemente acelerados condujeron a Newton a formular sus leyes fundamentales del movimiento, las cuales presentó en su obra principal Philosophiae Naturalis Principia Mathematica Los científicos actuales consideran que las leyes que formuló Newton dan las respuestas correctas a la mayor parte de los problemas relativos a los cuerpos en movimiento, pero existen excepciones. En particular, las ecuaciones para describir el movimiento no son adecuadas cuando un cuerpo viaja a altas velocidades con respecto a la velocidad de la luz o cuando los objetos son de tamaño extremadamente pequeños comparables a los tamaños moleculares.
Primera ley de Newton o Ley de la inercia
La primera ley del movimiento rebate la idea aristotélica de que un cuerpo sólo puede mantenerse en movimiento si se le aplica una fuerza. Newton expone que: "Todo cuerpo persevera en su estado de reposo o movimiento uniforme y rectilíneo a no ser que sea obligado a cambiar su estado por fuerzas impresas sobre él"
 Esta ley postula, por tanto, que un cuerpo no puede cambiar por sí solo su estado inicial, ya sea en reposo o en movimiento rectilíneo uniforme, a menos que se aplique una fuerza o una serie de fuerzas cuyo resultante no sea nulo sobre él. Newton toma en cuenta, así, el que los cuerpos en movimiento están sometidos constantemente a fuerzas de roce o fricción, que los frena de forma progresiva, algo novedoso respecto de concepciones anteriores que entendían que el movimiento o la detención de un cuerpo se debía exclusivamente a si se ejercía sobre ellos una fuerza, pero nunca entendiendo como esta a la fricción, en consecuencia, un cuerpo con movimiento rectilíneo uniforme implica que no existe ninguna fuerza externa neta o, dicho de otra forma, un objeto en movimiento no se detiene de forma natural si no se aplica una fuerza sobre él. En el caso de los cuerpos en reposo, se entiende que su velocidad es cero, por lo que si esta cambia es porque sobre ese cuerpo se ha ejercido una fuerza neta.
Esta ley postula, por tanto, que un cuerpo no puede cambiar por sí solo su estado inicial, ya sea en reposo o en movimiento rectilíneo uniforme, a menos que se aplique una fuerza o una serie de fuerzas cuyo resultante no sea nulo sobre él. Newton toma en cuenta, así, el que los cuerpos en movimiento están sometidos constantemente a fuerzas de roce o fricción, que los frena de forma progresiva, algo novedoso respecto de concepciones anteriores que entendían que el movimiento o la detención de un cuerpo se debía exclusivamente a si se ejercía sobre ellos una fuerza, pero nunca entendiendo como esta a la fricción, en consecuencia, un cuerpo con movimiento rectilíneo uniforme implica que no existe ninguna fuerza externa neta o, dicho de otra forma, un objeto en movimiento no se detiene de forma natural si no se aplica una fuerza sobre él. En el caso de los cuerpos en reposo, se entiende que su velocidad es cero, por lo que si esta cambia es porque sobre ese cuerpo se ha ejercido una fuerza neta.Segunda ley de Newton o Ley de fuerza
La segunda ley del movimiento de Newton dice que: "El cambio de movimiento es proporcional a la fuerza motriz impresa y ocurre según la línea recta a lo largo de la cual aquella fuerza se imprime"

Esta ley explica qué ocurre si sobre un cuerpo en movimiento actúa una fuerza neta: la fuerza modificará el estado de movimiento, cambiando la velocidad en módulo o dirección. En concreto, los cambios experimentados en el momento lineal de un cuerpo son proporcionales a la fuerza motriz y se desarrollan en la dirección de esta; esto es, las fuerzas son causas que producen aceleraciones en los cuerpos. Consecuentemente, hay relación entre la causa y el efecto, esto es, la fuerza y la aceleración están relacionadas.
En términos matemáticos esta ley se expresa mediante la relación:

Donde  es el momento lineal y
es el momento lineal y  la fuerza total. Si suponemos la masa constante y nos manejamos con velocidades que no superen el 10% de la velocidad de la luz podemos reescribir la ecuación anterior siguiendo los siguientes pasos:
la fuerza total. Si suponemos la masa constante y nos manejamos con velocidades que no superen el 10% de la velocidad de la luz podemos reescribir la ecuación anterior siguiendo los siguientes pasos:
es el momento lineal y la fuerza total. Si suponemos la masa constante y nos manejamos con velocidades que no superen el 10% de la velocidad de la luz podemos reescribir la ecuación anterior siguiendo los siguientes pasos:Sabemos que es el momento lineal, que se puede escribir m.V donde m es la masa del cuerpo y V su velocidad.
es el momento lineal, que se puede escribir m.V donde m es la masa del cuerpo y V su velocidad.
Consideramos a la masa constante y podemos escribir  aplicando estas modificaciones a la ecuación anterior:
aplicando estas modificaciones a la ecuación anterior:
aplicando estas modificaciones a la ecuación anterior:que es la ecuación fundamental de la dinámica, donde la constante de proporcionalidad, distinta para cada cuerpo, es su masa de inercia.

La importancia de esa ecuación estriba sobre todo en que resuelve el problema de la dinámica de determinar la clase de fuerza que se necesita para producir los diferentes tipos de movimiento: rectilíneo uniforme (m.r.u), circular uniforme (m.c.u) y uniformemente acelerado (m.r.u.a).
Tercera ley de Newton o Ley de acción y reacción
La tercera ley de newton nos dice que: "Con toda acción ocurre siempre una reacción igual y contraria: o sea, las acciones mutuas de dos cuerpos siempre son iguales y dirigidas en sentido opuesto"

Peso, fuerza y momento de fuerza
Fuerza: a fuerza es una magnitud física que mide la intensidad del intercambio de momento lineal entre dos partículas o sistemas de partículas (en lenguaje de la física de partículas se habla de interacción). Según una definición clásica, fuerza es todo agente capaz de modificar la cantidad de movimiento o la forma de los cuerpos materiales. No debe confundirse con los conceptos de esfuerzo o de energía, la fuerza es una modelización matemática de intensidad de las interacciones, junto con la energía. Así por ejemplo la fuerza gravitacional es la atracción entre los cuerpos que tienen masa, el peso es la atracción que la Tierra ejerce sobre los objetos en las cercanías de su superficie, la fuerza elástica es el empuje o tirantez que ejerce un resorte comprimido o estirado respectivamente, etc. En física hay dos tipos de ecuaciones de fuerza: las ecuaciones "causales" donde se especifica el origen de la atracción o repulsión: por ejemplo la ley de la gravitación universal de Newton o la ley de Coulomb y las ecuaciones de los efectos (la cual es fundamentalmente la segunda ley de Newton).

Momento de fuerza: se denomina momento de una fuerza (respecto a un punto dado) a una magnitud (pseudo)vectorial, obtenida como producto vectorial del vector de posición del punto de aplicación de la fuerza con respecto al punto al cual se toma el momento por la fuerza, en ese orden. También se le denomina momento dinámico o sencillamente momento.El momento de una fuerza  aplicada en un punto P con respecto de un punto O viene dado por el producto vectorial del vector
aplicada en un punto P con respecto de un punto O viene dado por el producto vectorial del vector  por el vector fuerza; esto es,
por el vector fuerza; esto es,
aplicada en un punto P con respecto de un punto O viene dado por el producto vectorial del vector por el vector fuerza; esto es,
Donde
 es el vector que va desde O a P.
es el vector que va desde O a P.
Por la propia definición del producto vectorial, el momento  es un vector perpendicular al plano determinado por los vectores
es un vector perpendicular al plano determinado por los vectores  y .
y .
es un vector perpendicular al plano determinado por los vectores y .Dado que las fuerzas tienen carácter de vectores deslizantes, el momento de una fuerza es independiente de su punto de aplicación sobre su recta de acción o directriz.
La definición de momento se aplica a otras magnitudes vectoriales. Así, por ejemplo, el momento de la cantidad de movimiento o momento lineal,  , es el momento cinético o momento angular,
, es el momento cinético o momento angular,  , definido como
, definido como
, es el momento cinético o momento angular, , definido como

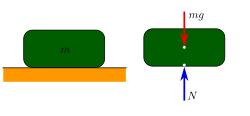
Condiciones de equilibrio
Para que estas condiciones se cumplan , la resultante de todas las fuerzas exteriores debe ser cero, por otra parte si existen variaciones en masa velocidad o direccion, se entiende que tambien hay un cambio y porlo tanto no hay equilibrio, un cuerpo se encuentra en equilibrio de traslación si la fuerza resultante de todas las fuerzas externas que actúan sobre él es nula.
Matemáticamente, para el caso de fuerzas coplanares, se debe cumplir que la suma aritmética de las fuerzas o componentes que tienen dirección positiva del eje X es igual a la suma aritmética de las que tienen dirección negativa del mismo. Análogamente, la suma aritmética de las fuerzas o componentes que tienen dirección positiva del eje Y es igual a la suma aritmética de las que tienen dirección negativa del mismo.

Geométricamente se debe cumplir que las fuerzas que actúan sobre el cuerpo en equilibrio, al ser graficadas de modo tal que el origen de cada fuerza se grafique a partir del extremo de otro, deben formar un polígono de fuerzas cerrado.

Y esto debe ser así porque al ser la resultante nula, el origen de la primera fuerza (F1 en este caso) debe coincidir con el extremo de la última (F4 en este caso).
Condiciones de equilibrio
EJEMPLO:
Una pelota de 300N cuelga atada a otras dos cuerdas, como se observa en la figura. Encuentre las tensiones en las cuerdas A, B Y C.

SOLUCIÓN:
El primer paso es construir un diagrama de cuerpo libre:

Al sumar las fuerzas a lo largo del eje X obtenemos :
S Fx = -A cos 60° + B cos 40° = 0
Al simplificarse por sustitución de funciones trigonométricas conocidas tenemos:
-0.5A + 0.7660B = 0 (1)
Obtenemos una segunda ecuación sumando las fuerzas a lo largo del eje Y, por lo tanto tenemos:
(Cos 30° + cos 50° )
0.8660A + 0 .6427B = 300N (2)
En las ecuaciones 1 y 2 se resuelven como simultanea A y B mediante el proceso de sustitución. Si despejamos A tenemos:
A = 0.7660 / 0.5
A = 1.532B
Ahora vamos a sustituir esta igualdad en la ecuación 2
0.8660(1.532B) + 0.6427B = 300N
Para B tenemos:
1.3267B + 0.6427B = 300N
1.9694B = 300N
B= 300N / 1.9694B= 152.33N
Para calcular la tensión en A sustituimos B = 152.33 N
A = 1.532(152.33N) = 233.3N
La tensión en la cuerda C es 300N , puesto que debe ser igual al peso.
Fricción
Se define como fuerza de rozamiento o fuerza de fricción, entre dos superficies en contacto, a aquella que se opone al movimiento entre ambas superficies (fuerza de fricción dinámica), o a la fuerza que se opone al inicio del movimiento (fuerza de fricción estática). Se genera debido a las imperfecciones, mayormente microscópicas, entre las superficies en contacto. Estas imperfecciones hacen que la fuerza perpendicular R entre ambas superficies no lo sea perfectamente, si no que forme un ángulo φ con la normal N (el ángulo de rozamiento). Por tanto, la fuerza resultante se compone de la fuerza normal N (perpendicular a las superficies en contacto) y de la fuerza de rozamiento F, paralela a las superficies en contacto.
Unos ejemplos de fricción son los siguientes:
* Al caminar sobre el piso lo empujamos y este a su vez nos empuja a nosotros.
* Las llantas de un auto contra el pavimento y este empuja aquellas
* Cuando nadamos, empujamos el agua hacia atras y esta nos empuja hacia delante
Ley de la gravitación universal
Es una ley física clásica que describe la interacción gravitatoria entre distintos cuerpos con masa. Ésta fue presentada por Isaac Newton en su libro Philosophiae Naturalis Principia Mathematica, publicado en 1687, donde establece por primera vez una relación cuantitativa (deducida empíricamente de la observación) de la fuerza con que se atraen dos objetos con masa. Así, Newton dedujo que la fuerza con que se atraen dos cuerpos de diferente masa únicamente depende del valor de sus masas y de la distancia que los separa. También se observa que dicha fuerza actúa de tal forma que es como si toda la masa de cada uno de los cuerpos estuviese concentrada únicamente en su centro, es decir, es como si dichos objetos fuesen únicamente un punto, lo cual permite reducir enormemente la complejidad de las interacciones entre cuerpos complejos.
Así, con todo esto resulta que la ""ley de la Gravitación Universal"" predice que la fuerza ejercida entre dos cuerpos de masas m1 y m2 separados una distancia d es proporcional al producto de sus masas e inversamente proporcional al cuadrado de la distancia, es decir
Así, con todo esto resulta que la ""ley de la Gravitación Universal"" predice que la fuerza ejercida entre dos cuerpos de masas m1 y m2 separados una distancia d es proporcional al producto de sus masas e inversamente proporcional al cuadrado de la distancia, es decir

Donde:
 es el módulo de la fuerza ejercida entre ambos cuerpos, y su dirección se encuentra en el eje que une ambos cuerpos.
es el módulo de la fuerza ejercida entre ambos cuerpos, y su dirección se encuentra en el eje que une ambos cuerpos. es la constante de la Gravitación Universal.
es la constante de la Gravitación Universal.
Es decir, cuanto más masivos sean los cuerpos y más cercanos se encuentren, con mayor fuerza se atraerán. El valor de esta constante de Gravitación Universal no pudo ser establecido por Newton, que únicamente dedujo la forma de la interacción gravitatoria, pero no tenía suficientes datos como para establecer cuantitativamente su valor. Únicamente dedujo que su valor debería ser muy pequeño. Sólo mucho tiempo después se desarrollaron las técnicas necesarias para calcular su valor, y aún hoy es una de las constantes universales conocidas con menor precisión. En 1798 se hizo el primer intento de medición (véase el experimento de Cavendish) y en la actualidad, con técnicas mucho más precisas se ha llegado a estos resultados:

en unidades del Sistema Internacional.
Tambien, Newton descubrio que la fuerza productora de la caida de los cuerpos sobre la superficie terrestre es la misma que atrae a la Luna obligandola a permanecer alrededor de la Tierra.
También encontró que dicha fuerza actua entre todos los planetas y entre toda la materia del Universo. A esta fuerza se le llama gravitación, la ley propuesta por Newton acerca de la dirección e intensidad de dicha fuerza se conoce como ley de la gravitación universal, la intensidad de la fuerza de atracción gravitacional que existe entre dos cuerpos depende de la masa de esos cuerpos y de la distancia que existen entre ellos.
- Cuanto mayores sean las masas de los cuerpos, mayor sera la atracción gravitacional entre ellos.
- Cuanto mayor sea la distancia que existe entre los cuerpos, menor sera la atraccion gravitacional entre ellos.
Leyes de Kepler
Las leyes de Kepler fueron enunciadas por Johannes Kepler para describir matemáticamente el movimiento de los planetas en sus órbitas alrededor del Sol. Aunque él no las enunció en el mismo orden, en la actualidad las leyes se numeran como sigue:
- Primera ley (1609): todos los planetas se desplazan alrededor del Sol siguiendo órbitas elípticas. El Sol está en uno de los focos de la elipse.
- Segunda ley (1609): el radio vector que une un planeta y el Sol barre áreas iguales en tiempos iguales.
La ley de las áreas es equivalente a la constancia del momento angular, es decir, cuando el planeta está más alejado del Sol (afelio) su velocidad es menor que cuando está más cercano al Sol (perihelio). En el afelio y en el perihelio, el momento angular L es el producto de la masa del planeta, su velocidad y su distancia al centro del Sol.

- Tercera ley (1618): para cualquier planeta, el cuadrado de su período orbital es directamente proporcional al cubo de la longitud del semieje mayor al de su órbita elíptica.

Donde, T es el periodo orbital (tiempo que tarda en dar una vuelta alrededor del Sol), (L) la distancia media del planeta con el Sol y K la constante de proporcionalidad, estas leyes se aplican a otros cuerpos astronómicos que se encuentran en mutua influencia gravitatoria, como el sistema formado por la Tierra y la Luna.
No hay comentarios:
Publicar un comentario